华东理工大学机械与动力工程学院副教授殷瑞雪等,提出了一种无结构限制的通用微纳机器人(MNRs)动力学模型,可在临床环境中通过定制个体患者来规划MNRs的导航,了解血液在与MNRs相互作用时的行为,从而预防MNRs靶向治疗中引起的并发症。这项研究对MNRs在医学和生物医学工程等领域的应用具有一定启发性,近日发表于《自然—通讯》。
MNRs在利用血管输送实现病灶微创靶向治疗方面极具潜力,对改善人类健康具有开拓性的影响。然而,当前MNRs的临床应用受到诸多限制,其中最关键的限制之一为如何克服血流运动影响实现MNRs的精准控制。
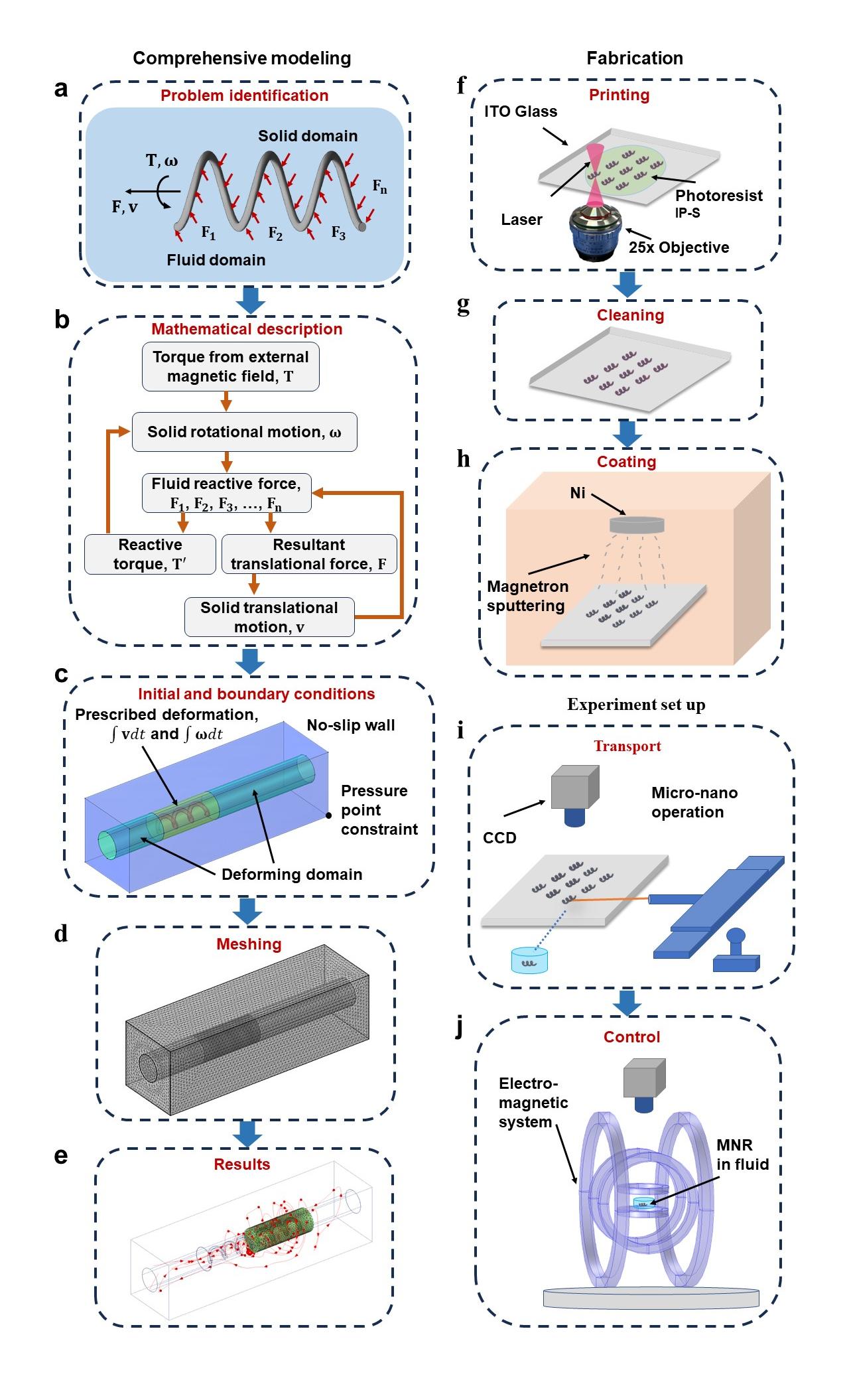
针对现有动力学模型仅适用于标准螺旋结构MNRs的问题,研究团队提出了一种无结构限制的通用MNR动力学模型,并通过仿真和实验验证了该模型在预测多种不同结构MNRs运动规律的准确性。
微纳米机器人螺旋运动数学模型建立及双光子打印制备。图片来源于《自然—通讯》
模型深入阐述了MNRs的运动机理,展示了其在推进速度预测和精确导航方面的巨大潜力,还为MNRs的结构设计和性能优化开辟了新途径。模型将有助于利用模式识别技术构建磁输入和运动输出之间的通用MNRs动态关系,为精确的闭环控制系统奠定基础。模型还能够与磁场、声场、热场等多种外部驱动方法紧密结合,拓宽MNRs的应用范围并提高其有效性。
相关论文信息:https://doi.org/10.1038/s41467-024-51518-z
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:
[email protected]。