近日,上海交通大学义理林教授与中山大学李朝晖教授等人合作,基于智能锁模算法、时间拉伸技术和实时高速电路建立的实时光谱控制平台,首次实现了锁模激光器输出飞秒脉冲的实时光谱控制,可通过算法智能调节输出飞秒脉冲光谱的带宽、形状以及脉冲的时域宽度。此外,该研究还展示了锁模激光器从窄谱锁模态到宽谱锁模态的复杂动力学过程,为进一步研究锁模激光器内部复杂的非线性动力学提供新视角。相关成果于近期以“Intelligent control of mode-locked femtosecond pulses by time-stretch-assisted real-time spectral analysis”在线发表在国际顶尖光学期刊《Light: Science & Applications》上。论文第一作者是上海交通大学博士生蒲国庆,通讯作者为义理林教授。
输出脉冲宽度为10-15秒的飞秒脉冲激光器作为重要的基础研究工具,在物理、化学、生物、材料、信息科学等领域都有广泛的应用。锁模是产生飞秒脉冲的主要手段,实现方式有主动锁模、被动锁模以及混合锁模。其中,基于非线性偏振演化(Nonlinear polarization evolution, NPE)的被动锁模因其简单的结构和优异的脉冲性能备受亲睐。通过调节激光腔内的偏振控制器即可实现锁模,但是,手动调节偏振控制器实现锁模耗时较长,一旦环境扰动极易失锁且难以恢复,限制了其在工业界的大幅应用。针对这一难题,基于电偏振控制器(Electrical polarization controller, EPC)的自动锁模技术应运而生。然而,大多数自动锁模均是基于时域和频域的分析和判决来实现,忽略了超短脉冲非常重要的光谱信息。因此,自动锁模找到的锁模状态光谱无法预测,可能含有很强的连续光分量或者光谱宽度太窄(时域脉冲宽度太宽),难以达到最优锁模状态或者特定锁模状态,而这些状态在绝大部分研究中才具有重要意义。因此,光谱的特性是衡量超短脉冲性能的重要指标。光谱仪虽可识别飞秒脉冲积分光谱但无法识别其瞬时光谱,并且具有体积大、成本高、速度慢的缺点,难以应用于自动锁模激光器中。
在这项工作中,研究团队利用时间拉伸-色散傅里叶变换(time stretch dispersive Fourier transformation, TS-DFT)技术,结合基于FPGA的智能控制算法和实时控制电路,设计了时间拉伸辅助的实时脉冲控制器(time-stretch-assisted real-time pulse controller, TSRPC),首次实现了对锁模激光器产生的飞秒脉冲进行实时的光谱精细控制。通过时域到光谱的转换,采用低速ADC即可识别飞秒脉冲对应的瞬时光谱宽度和形状。结合智能控制算法,实现了以1.47nm为精度对飞秒脉冲光谱宽带从10nm到40nm进行可编程调控,光谱形状可编程为双曲正割型或三角形等。理论上只要锁模激光器内部存在某一特定的锁模态,都可以通过TSPRC技术自动搜索并锁定到该状态。锁模激光器中如何复现具有特定光谱分布的锁模态一直是一个难题,困扰着锁模激光器的应用。该研究通过实时的光谱精细控制,为复现具有特定光谱分布的锁模态提供了可能。基于实时的光谱控制,该研究还展示了从窄谱锁模态至宽谱锁模态以及从三角形光谱脉冲态至宽谱锁模态的演变过程,发现两者动力学过程具有相似性,提出了目标锁模状态可能决定中间动力学过程的猜想,为人们进一步探索锁模激光器内部机理提供新视角。据悉,本论文的核心概念已提交了中国发明专利申请。
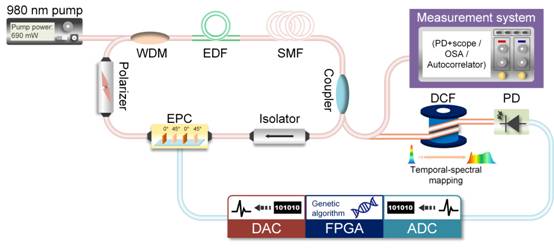
图1. 嵌入TSRPC的智能锁模激光器。

图2. 光谱半高全宽的可编程控制。
激光器重复频率~3.78MHz时
(a)光谱宽度可编程:10nm至40nm以5nm为间隔的光谱。
(b)相应的脉冲自相关曲线。
激光器重复频率~8.6MHz时
(c)光谱宽度可编程:10nm至20nm以5nm为间隔的光谱。
(d)相应的脉冲自相关曲线。
激光器重复频率~3.78MHz时
(e)利用TSRPC连续10次搜寻最大光谱宽度,得到的光谱均非常相似,侧面说明系统的可重复性。
(f)未使用光谱控制的自动锁模测试,其得到的脉冲态的光谱宽度和时域宽度均不可控制,证明了TSRPC控制光谱宽度的有效性。
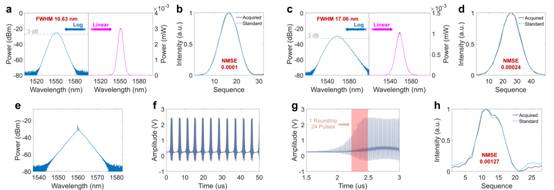
图3. 光谱形状的可编程控制。
(a)TSRPC实现宽度为10.63nm的双曲正割型光谱。
(b)得到的脉冲与标准脉冲之间的归一化均方误差仅为0.0001。
(c)TSRPC实现宽度为17.06nm的双曲正割型光谱。
(d)得到的脉冲与标准脉冲之间的归一化均方误差仅为0.00024。
(e)TSRPC实现宽度为三角形光谱。
(f)三角形光谱对应的时域波形。
(g)时域波形的局部放大。
(h)得到的脉冲与标准脉冲之间的归一化均方误差仅为0.00127。
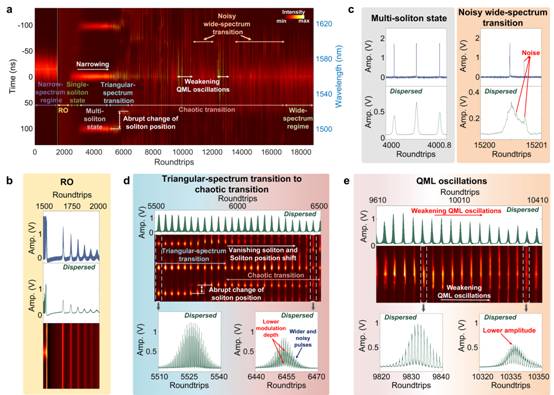
图4.窄谱锁模态至宽谱锁模态的动力学过程。
(a)窄谱锁模态至宽谱锁模态的动力学过程,包含弛豫振荡(RO)、单孤子态(Single-solitonstate)、多孤子态(multi-soliton state)、三角型光谱过渡态(triangular-spectrum transition)、混沌过渡态(chaotic transition)等中间过渡态。
(b)弛豫振荡。
(c)多孤子态和带噪的宽谱过渡态。
(d)三角型光谱过渡态至混沌过渡态的演变。
(e)调Q锁模振荡(QMLoscillation)。
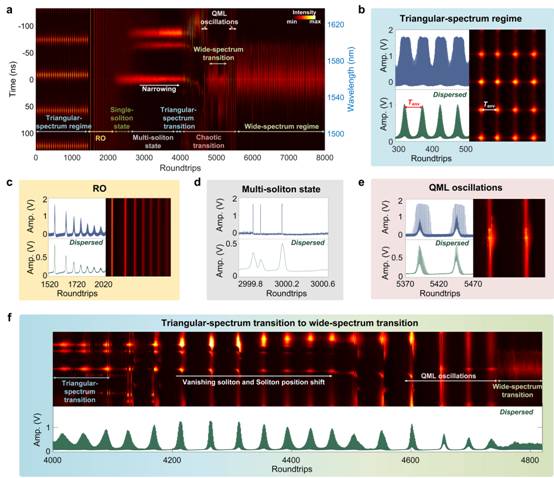
图S1.三角形光谱脉冲态至宽谱锁模态的动力学过程。
(a)三角形光谱脉冲态至宽谱锁模态的动力学过程,包含弛豫振荡、单孤子态、多孤子态、三角型光谱过渡态、混沌过渡态等中间过渡态。可以看到,此动力学过程与窄谱锁模态至宽谱锁模态的动力学过程非常相似。
(b)三角形光谱脉冲态。
(c)弛豫振荡。
(d)多孤子态。
(e)调Q锁模振荡。
(f)三角型光谱过渡态至宽谱过渡态的演变。
(来源:科学网)
相关论文信息:https://doi.org/10.1038/s41377-020-0251-x






