|
|
|
|
|
四川大学赵云教授团队:基于dsRNA剪接进化算法的空间机器人定时避障轨迹规划参数优化 | MDPI Appl. Sci. |
|
|
论文标题:Parameter Optimization of dsRNA Splicing Evolutionary Algorithm Based Fixed-Time Obstacle-Avoidance Trajectory Planning for Space Robot(基于dsRNA剪接进化算法的空间机器人定时避障轨迹规划参数优化)
期刊:Applied Sciences
作者:Junyu Yao, Wen Yan, Qijie Lan, Yicheng Liu and Yun Zhao
发表时间:23 September 2021
DOI:10.3390/app11198839
微信链接:
https://mp.weixin.qq.com/s?__biz=MzI1MzEzNjgxMQ==&mid=2650043721&idx=4&sn=
77412bafe7da9232e2ffa983ca98611f&chksm=f1d9cf8dc6ae469be0dbe1e881923910ad
9636344432dc0bb4ccda4957aa8caad1ae8879ed10&token=218529226&lang=zh_CN#rd
期刊链接:
https://www.mdpi.com/journal/applsci
作者简介

赵云 教授 四川大学
赵云,四川大学教授、博士生导师,教育部高等学校生物技术、生物工程专业教学指导委员会委员。近年主持国家和省部级科研项目10项,以第一作者或通讯作者在国际知名学术期刊发表SCI论文48篇,主持或作为主研选育出20个杂交油菜新品种,累计在国内推广3千万亩以上。曾被授予“四川省农业科技先进工作者”、“四川省有突出贡献优秀专家”以及“四川省学术和技术带头人”,获得四川省科技进步一等奖1项、三等奖2项、四川省教学成果一等奖1项。
研究方向:植物遗传育种及其生物技术、核酸纳米技术、污染土壤的植物修复。

刘宜成 副教授 四川大学
刘宜成,四川大学电气工程学院副教授、硕士生导师。清华大学控制科学与工程博士、中国自动化学会机器人专业委员会会员。
研究方向:无人智能系统、电力电子及电气传动、智能优化、学习、控制和应用,以及面向控制的刚柔混合多体系统建模等。
引言
随着机器人技术的发展,机器人作为人类的辅助工具在太空、工厂、海洋和城市中得到了广泛应用。在空间活动中,机器人能够有效地处理空间垃圾,这对其他航天器的安全至关重要。垃圾捕集任务的关键是轨迹跟踪,其中轨迹规划尤为重要。目前,机器人关节角速度轨迹优化的一种重要策略是利用进化算法对轨迹规划的算法参数进行优化。但是基于进化算法的轨迹优化策略往往是保守的,结果通常会陷入局部最优,因此寻找最接近全局最优解是遗传算法的重要任务。来自四川大学的刘宜成与赵云教授及其团队在Applied Sciences 上发表的文章提出了一种双臂自由空间机器人的轨迹规划策略,其创新点如下:提出了一种新的低输入定时稳定系统,以减小系统输入的上界;研究了一种新的dsRNA剪接进化算法,优化算法参数,使适应度更好;利用基于dsRNA拼接进化算法的固定时间轨迹规划策略,规划空间机械臂关节的光滑角速度轨迹,使末端执行器的跟踪误差在固定时间内渐近收敛。
实验和仿真
01 dsRNA剪接进化算法实验
由定理1 (如下) 给出的固定时间稳定系统进化算法的计算机实验。

如图1所示,dsRNA剪接进化算法的参数适应度优化曲线在第21代左右收敛到稳定值 (0.7954),因此,优化策略可以发现一个输入小于现有定时稳定系统的参数m=0.4986,接近全局最优值。由图2可知,在系统输入x˙[1]下,系统状态x能在1.68 s内收敛到0,且系统输入曲线光滑。

图1. dsRNA剪接进化算法的适应度曲线。

图2. 输入小于现有的固定时间稳定的系统的状态及输入曲线。
02 空间机器人轨迹规划仿真
文章中的空间机器人轨迹规划仿真将考虑重力梯度摄动,并以参数摄动 (1±20%sin(t)) 的形式进行初步模拟。研究选取现有的两种方法和一种未优化的方法,与提出的新方法进行对比且常数参数设置相同,以证明所提出的双臂自由空间机器人轨迹规划方法的优点。如图3和图4所示,该方法可以在保证精度的前提下对机械手的关节运动轨迹进行优化。在图4中,b和d方法的关节角速度θ62均大于180°,容易造成机械臂过载。与b和d方法相比,该方法的关节角速度很少超过100°,也从未超过180°,因此基于dsRNA剪接进化算法的优化策略是行之有效的。
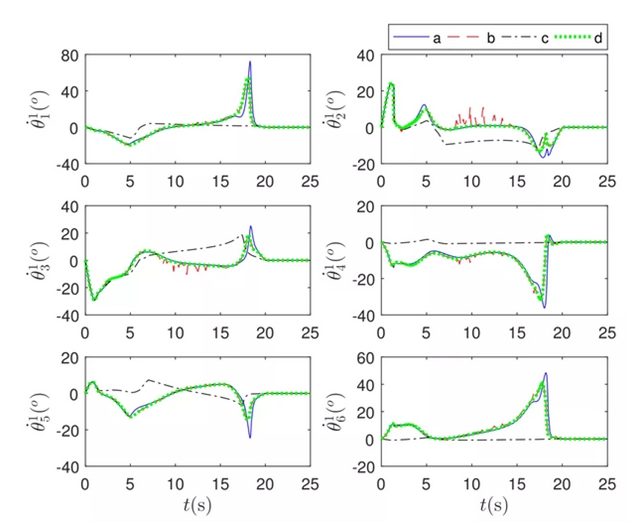
图3. 四种方法的任务臂的关节角速度。

图4. 四种方法的平衡臂的关节角速度。
结论
本文为双臂自由空间机器人提出了一种新的dsRNA拼接进化算法,以及一种新颖且光滑的、固定时间的高精度避障轨迹规划方法。与基准算法相比,该进化算法的性能提高了7.56%-30.40%。该进化算法可以模仿dsRNA病毒基因剪接进化,优化定时避障轨迹规划算法的参数,使规划的关节角速度轨迹比现有方法更平滑、更精确。此外,与现有的无反馈最优轨迹规划策略相比,该方法消除了误差条件,从根本上减少了计算量,提高了精度。在未来,研究者们将把基于dsRNA剪接进化算法的轨迹规划策略应用到植物机器人中,并对该进化算法的编码方法进行改进,使其能够用于生物信息检测。
注释:

Applied Sciences 期刊介绍
主编:Takayoshi Kobayashi, The University of Electro-Communications, Japan
期刊主题涵盖应用物理学、应用化学、工程、环境和地球科学以及应用生物学的各个方面。


特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






