|
|
|
|
|
Lightsaber:LIGO角度传感与控制系统模拟器 | MDPI Galaxies |
|
|
论文标题:Lightsaber: A Simulator of the Angular Sensing and Control System in LIGO (Lightsaber:LIGO角度传感与控制系统模拟器)
期刊:Galaxies
作者:Tomislav Andric and Jan Harms
发表时间:5 September 2021
DOI:10.3390/galaxies9030061
微信链接:
https://mp.weixin.qq.com/s?__biz=MzI1MzEzNjgxMQ==&mid=2650048717&idx=3&sn=
d75c62d5cdb5ec21ce12ecfa3f7a7807&chksm=f1d93209c6aebb1f31359165385258a11
ea209315dfee149a6fe4ccca4ba924189fc35684d61&token=1910072809&lang=zh_CN#rd
期刊链接:https://www.mdpi.com/journal/galaxies
从2015年9月“双黑洞并合引力波”被发现,到2017年8月LIGO/VIRGO科学合作组对“双中子星并合事件”——GW 170817的引力波及其电磁对应体信号的相关研究发表,“引力波天文学”逐渐受到更广泛的关注。而GW 200105和GW 200115的发现则弥补了“双星并合引力波”相关事件的空缺。随着“多信使天文学”的发展,业内学者对引力波 (GW) 及其电磁对应体的相关研究也愈发深入,这让人们得以从一个全新的视角来观察宇宙,并提出了其他观测手段无法获得的天体物理学见解。
“Advanced LIGO 隔振系统”
LIGO是探测引力波的大型物理实验室和天文观测台,因在2015年完成了升级,随后被称为aLIGO (Advanced LIGO),并于同年实现了对引力波的首次探测。aLIGO的灵敏度相较于最初版本要高出很多,并覆盖更宽的频段;在固定信号强度下可以观察到的致密质量范围扩大了四倍以上。其子系统包括多个部分,比如:辅助光学、核心光学、数据采集、数据和计算系统、设施改造、输入光学、干涉仪控制、预稳定激光、隔振和悬挂系统。Advanced LIGO探测器的隔振系统由一个提供低振动平台的有源级组成,其被动隔振系统以“四分摆台 (QUAD)”的形式悬挂在平台上 (见图1)。QUAD承载了悬挂平台的振动噪声并且将其噪声水平降低了几个数量级,从而实现LIGO所需的位移灵敏度 (即10赫兹频段低于1019米)。通过这种方式,LIGO通过主动和被动隔振系统使其提高探测引力波的能力,但该系统并没有完全解决LIGO中的振动噪声问题。

图1 LIGO四分摆台 (QUAD) 示意图。
“干涉仪稳定性的实现”
LIGO激光干涉仪是非常复杂的光机械系统 (如图2所示),其力学角受辐射压 (RP) 效应的支配。由于在高频 (>200 Hz) 散粒噪声限制带中应变灵敏度提高,故而臂腔中需要更大的光功率。随着光功率的增大,“光机械耦合”变得更强,导致辐射压噪声和干涉仪控制出现新的问题。除了“辐射压效应”外,大功率同时会导致“热副效应”的出现,而为了能够有效地进行干涉仪 (IFO) 操作,则必须解决这些热效应问题。
“辐射压力产生扭矩”是一个众所周知的问题,但首次观察到光学扭矩使光腔不稳定的现象是在1991年。而直到2006年,辐射压影响角机械传递函数 (tfs) 才被成功建模,Sidles和Sigg在论文中正式提出该理论。有观点认为,辐射压可能是限制“LIGO增加臂腔内光功率能力”的重要因素。
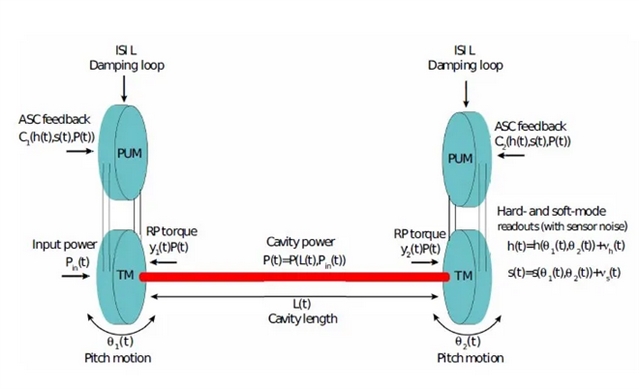
图2 模拟光机械系统的示意图,该系统由高功率腔激光束和LIGO中带有控制系统的最后两级悬架组成。
为了使干涉仪在高功率下稳定运行并且使波束处于正确的空间模式,同时在反对称端口处保持良好的干涉效果并且还能限制与技术噪声源的耦合,此时使测试质量 (TM) 在低于3赫兹的低频条件下稳定就显得尤为重要。实现这一目标的控制系统中的一个重要部分是“角度传感和控制 (ASC)”。除了减少角位移外,ASC还用于解决高达几赫兹的光机械不稳定性的问题。角度传感与控制效率的最重要衡量标准之一是它对差动臂 (DARM) 通道的贡献了多少噪声。差动臂是长Fabry-Perot臂腔之间的微分长度变化,因为它对引力波最为敏感,所以被认为是其中最重要的自由度。为了使干涉仪操作达到所需的灵敏度,则必须抑制动臂的剩余运动。DARM和ASC信号之间的相关性很低,这意味着这种耦合本质上是非线性的。反射镜上的光束-点 (BS) 运动与反射镜角运动的组合产生非线性角度从而实现长度耦合。只要由于这种耦合引起的差动臂噪声远低于所需的位移灵敏度,并且只要整体角运动足够小,使得干涉仪可以稳定运行,ASC就会表现良好。
“新ACS时域模拟器”
在低频条件下控制测试质量的过程中,高频噪声被引入到观测频段,其主要来自于传感器的读出噪声和较少由QUAD倒数第二个质量 (PUM) 处的执行器缺陷则会直接干扰到引力波的测量。在角度传感和控制过程中,要求将角TM运动的均方根 (RMS) 降低到1 nrad以下,并在10赫兹以上的角TM运动中引入尽可能低的噪声以满足灵敏度要求。由于在第三次观测运行 (O3) 期间,控制噪声在大约 10赫兹到25赫兹区间占据主导地位,比量子噪声高10到100倍,并且是高达55赫兹的重要噪声源,因此减轻这种噪声以实现灵敏度的提升是十分重要的;减少它,则可观测到的引力波信号的信噪比将增加。
具体而言,对中子星双星绕转的早期观测可用于提醒天文台即将发生的并合事件从而极大地推动对中等质量黑洞双星的探测活动的进行,或许可以在更长的时间内观测到波形的演化。这意味着可以更准确地估计双星系统的一些参数并进行准确定位。
引力波 (GW) 探测器的悬浮测试质量需要精确校准才能以较高的灵敏度稳定地运行。如上所述,所观测到的ASC噪声比简单模型预测的要大,这意味着我们需要更准确的探测器模型和新型的模拟工具。来自格兰萨索科学研究所/国家实验室的Tomislav Andric和Jan Harms在他们的工作中介绍了Lightsaber (LIGO中新的ASC时域模拟器)。Lightsaber是光机械系统的非线性模拟 (见图3),该系统由高功率腔激光束和LIGO中包括ASC的最后两级悬架组成。
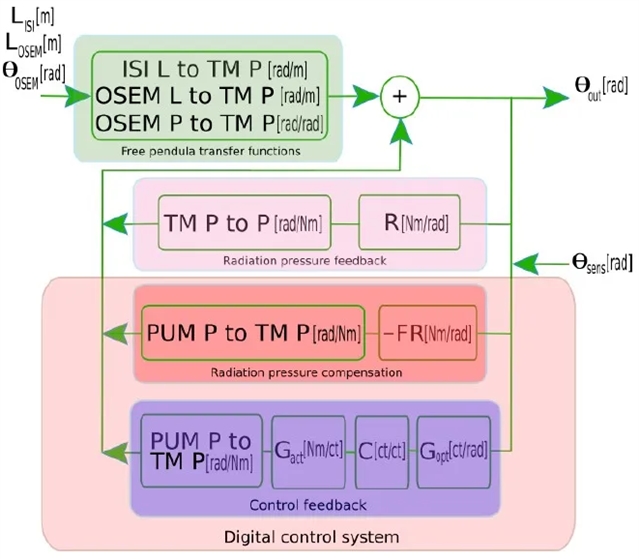
图3 Lightsaber模拟组分图解 (包括RPC和反馈控制);F是增益调整因子,Gopt将角运动转换为数字计数,Gact将数字计数转换为驱动扭矩。
研究总结
其主要的噪声输入是臂腔入口处激光束的功率波动、用于ASC的传感器的读出噪声、来自悬架平台的位移噪声以及由悬架阻尼环引入的噪声。虽然模拟过程使用单个悬架系统的局部自由度,但控制是在全局角度基础上应用的,这需要在局部和全局之间进行转换以进行传感和驱动。可以通过这种模拟进行的一些研究,包括测试质量的束-点 (BS) 位置的中心偏移、激光功率波动对角动力学的作用以及各种非线性动力学的作用等。未来这项工作的下一步是详细比较Lightsaber结果和来自LIGO探测器控制信道的数据。
Galaxies 期刊介绍
主编:Prof. Dr. Emilio Elizalde, Consejo Superior de Investigaciones Científicas, Instituto de Ciencias del Espacio, Institut dEstudis Espacials de Catalunya
Galaxies (ISSN 2075-4434) 专注于发表天文学、天体物理学、宇宙学等相关学科领域的研究论文,现已被ADS,Scopus,ESCI等数据库收录。
2020 CiteScore:2.8
Time to First Decision:17.6 Days
Time to Publication:21.3 Days


特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






