|
|
|
|
|
Applied Sciences:无处不在的无人机 | MDPI 编辑荐读 |
|
|
微信链接:
https://mp.weixin.qq.com/s?__biz=MzkyNjI3NjI4Mg==&mid=2247494817&idx=2&sn=
a6cb2c17c54c3388fe4da214352f05df&chksm=c23b6374f54cea62c7c7690640b89e7
58c49e5341903246dd89898461ea29342b967e0c5a375&token=1694293557&lang=zh
_CN#rdhttps://mp.weixin.qq.com/s?__biz=MzkyNjI3NjI4Mg==&mid=2247494817&idx=2&sn=
a6cb2c17c54c3388fe4da214352f05df&chksm=c23b6374f54cea62c7c7690640b89e758c49e
5341903246dd89898461ea29342b967e0c5a375&token=1694293557&lang=zh_CN#rd
期刊链接:https://www.mdpi.com/journal/applsci
Applied Sciences 编辑部精选了五篇有关“无人机”主题的专题文章,希望能为相关领域的读者提供有价值的参考。
Anti-Disturbance Control for Quadrotor UAV Manipulator Attitude System Based on Fuzzy Adaptive Saturation Super-Twisting Sliding Mode Observer
基于模糊自适应饱和超扭滑模观测器的四旋翼无人机姿态系统抗扰控制
Ran Jiao et al.
https://doi.org/10.3390/app10113719

具有坐标参考系的四旋翼和机械臂系统图。
文章亮点:
(1) 作者研究了一种配备二级自由度机械臂结构的四旋翼机械臂,在扰动情况下如何进行高精度姿态控制问题;
(2) 本文提出了一种新的滑模扩展状态观测器 (SMESO) 来估算干扰情况,并建立了一个反推姿态控制器来削弱干扰产生的影响;
(3) 作者结合了饱和函数、跟踪微分器 (TD) 和模糊逻辑规则,最终构建了四旋翼无人机机械臂系统的整体控制方案。
Robust Detection, Classification and Localization of Defects in Large Photovoltaic Plants Based on Unmanned Aerial Vehicles and Infrared Thermography
利用无人机和红外热成像技术对大型光伏电站的缺陷进行检测、分类和定位
Alberto Fernández et al.
https://doi.org/10.3390/app10175948
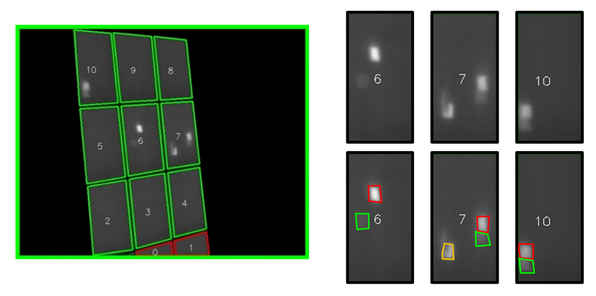
基于三类严重性缺陷的检测和分类图。
文章亮点:
(1) 本文总结了电气性能测量与图像处理这两种方式对光伏电站进行监控时,各自存在的问题与特点;
(2) 文章证明了使用无人机 (UAV) 对光伏电站进行 IRT 成像以监测光伏组件的健康状态,是经济且有效的方法;
(3) 通过在真实光伏电站上进行的测试,作者发现利用无人机和红外热成像技术,可以全面表征光伏电站的热缺陷。
Lightweight Semantic Segmentation Network for Real-Time Weed Mapping Using Unmanned Aerial Vehicles
应用于无人机实时杂草映射的轻量级语义分割网络
Jizhong Deng et al.
https://doi.org/10.3390/app10207132
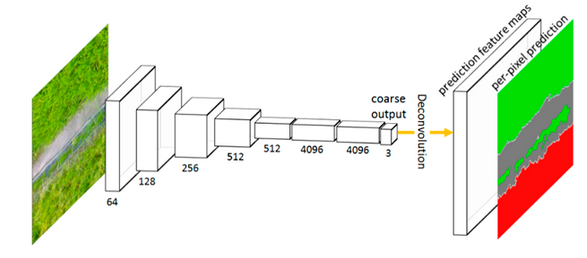
FCN的一般架构图。
文章亮点:
(1) 作者在无人机上进行了实时图像处理,以减少图像采集和除草剂处理之间的时间差距;
(2) 实验结果表明,作者所提出的轻量级语义分割网络在效率和准确性方面优于当前使用的普通网络;
(3) 作者修改后的网络架构证明了其在实际农业监测和精确喷洒应用中的潜力。
Deep Reinforcement Learning Based Resource Management in UAV-Assisted IoT Networks
无人机辅助物联网中基于深度强化学习的资源管理
Yirga Yayeh Munaye et al.
https://doi.org/10.3390/app11052163
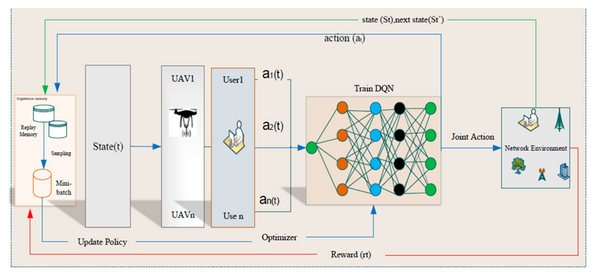
基于 DRL 的 RM 算法的多智能体框架示意图。
文章亮点:
(1) 无人驾驶飞行器 (UAV) 可用于安全检查、空中巡逻和交通评估等大规模应用,文章认为无人机辅助资源管理对于第五代网络的发展至关重要;
(2) 本文提出了一种深度强化学习方法 (DRL),目的是为了提高资源管理方案中回收和分类任务的准确性;
(3) 本文使用了一个集成了 DRL 和 K-means 的大型数据集,相对于传统的资源管理方法,可以在一系列真实环境中生成最优策略。
Discontinuity Characterization of Rock Masses through Terrestrial Laser Scanner and Unmanned Aerial Vehicle Techniques Aimed at Slope Stability Assessment
通过地面激光扫描仪和无人机技术对岩体的不连续特征进行斜坡稳定性评估
Marco Pagano et al.
https://doi.org/10.3390/app10082960

直接从点云识别的主要不连续平面的图形示意图:(a) all sets;(b) bedding;(c) K1;(d) K2。
文章亮点:
(1) 本文通过生成密集点云和相关半自动获取的不连续性数据以进行稳定性分析;
(2) 文中通过分析意大利坎帕尼亚火山碎屑岩悬崖和普利亚天然喀斯特洞穴这两个案例,来阐明作者对地面激光扫描仪和无人驾驶飞行器技术优缺点的考虑 。
Applied Sciences 期刊介绍
主编:Takayoshi Kobayashi, The University of Electro-Communications, Japan
期刊主题涵盖应用物理学、应用化学、工程、环境和地球科学以及应用生物学的各个方面。截止目前被SCIE、Scopus等多种数据库收录,JCR分区在多学科工程以及应用物理领域都在Q2。
2020 Impact Factor:2.679
2020 CiteScore:3.0
Time to First Decision:16 Days
Time to Publication:37 Days

特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






