|
|
|
|
|
Applied Sciences:这些机器人帮大忙了! | MDPI 编辑荐读 |
|
|
期刊链接:https://www.mdpi.com/journal/applsci
微信链接:
https://mp.weixin.qq.com/s?__biz=MzI1MzEzNjgxMQ==&mid=2650057753&idx=2&sn=
682fc4b5dca43fb1bf2322c0ffde8dba&chksm=f1d916ddc6ae9fcba333c9ff883f31f9a7ece
1f575693deec8b430a0690ff300d1a17a087354&token=1290139342&lang=zh_CN#rd
本期编辑荐读,Applied Sciences 编辑部精选了五篇机器人相关文章,希望能为相关领域读者带来有价值的参考。
文章推荐
1. An Inspection Robot for Belt Conveyor Maintenance in Underground Mine—Infrared Thermography for Overheated Idlers Detection
地下矿井带式输送机维修检测机器人——红外热像仪过热托辊检测
Jaros?aw Szrek et al.
DOI:10.3390/app10144984
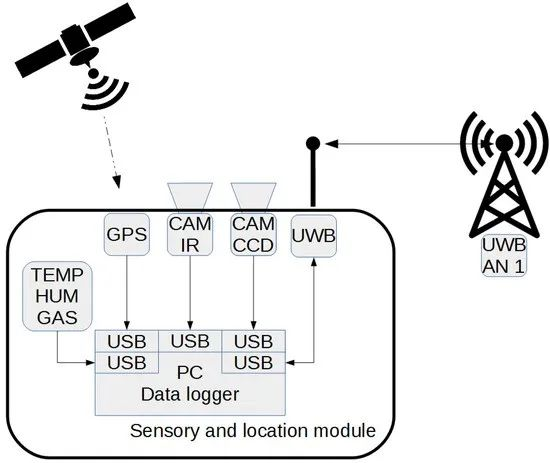
感官和定位模块。
众所周知,机械系统需要监督和维护程序,目前普遍使用的状态监测技术众多,在物联网和预测性维护的时代,人们可能会发现各种应用解决方案。然而不幸的是,涉及地下采矿中使用的带式输送机时,可能的解决方案迅速减少。本文提出了一种基于UGV平台的检测机器人原型,该机器人可以在检测过程中支持维修人员。目前,此种机器人均由操作员使用无线电控制,但本研究的计划是使其实现自主控制。检测机器人的支持意义重大,因为机器人可以“看到”传送带路线的元素 (RGB摄像头),并能使用红外热成像识别热点,还能对检测到的热点进行定位,并将其位置与两种图像一起存储。此外,还可以实时预览图像,并且存储的数据允许在检查任务后对输送系统状态进行分析。
2. Modeling and Identification of an Industrial Robot with a Selective Modal Approach
用选择性模态方法对工业机器人进行建模和识别
Matteo Bottin et al.
DOI:10.3390/app10134619

Adept Viper s650机器人的测试轴线。
工业机器人的刚度特性对于许多工业应用非常重要,如机器人的自动装配和材料去除过程 (如机械加工和去毛刺)。一方面,在机器人装配中,关节柔度可用来补偿被装配零件的尺寸误差;另一方面,在材料去除过程中,需要末端执行器的高笛卡尔刚度。此外,当使用低刚度机器人时,可能会引起低频颤振,损害加工表面的质量。本文建立了一种工业机器人柔顺关节动力学模型,采用模态方法对关节刚度进行了实验识别。首先,作者提出了一种选择实验构型的新方法,使得在每个构型中,仅涉及一个关节的振动模态被激发;然后,在选定的构型下进行实验测试,以识别关节刚度;最后,将所建立的机器人动力学模型用于预测机器人工作空间固有频率的变化。
3. Mobile Robotics in Agricultural Operations: A Narrative Review on Planning Aspects
农业作业中的移动机器人:规划方面的叙述性回顾
Vasileios Moysiadis et al.
DOI:10.3390/app10103453

移动机器人通用架构。
移动机器人在农业领域的出现标志着数字化转型,新的自动化技术优化了一系列劳动密集型、资源密集型和耗时的农业作业。相关术语经常被互换使用,使得行业内缺乏一个通用的移动机器人技术词典,这造成了研究和实践利益相关者之间的混乱。此外,由于相关研究较少,自动化农业运营中的规划属性仍缺乏一致的定义。基于此,本文采用“叙述性”综述,(1) 提供了用于自主操作的移动机器人技术方面的基本术语;(2) 评估了农业环境中移动机器人的基本规划。根据现有研究的综合证据,本文涵盖了七个规划属性:高级控制特定属性,包括推理架构、世界模型和规划层次;操作特定属性,包括运动-任务连接和能力约束;物理机器人特定属性,包括车辆配置和车辆运动学。
4. An SVM-Based Neural Adaptive Variable Structure Observer for Fault Diagnosis and Fault-Tolerant Control of a Robot Manipulator
基于支持向量机的神经自适应变结构观测器用于机器人机械手故障诊断和容错控制
Farzin Piltan et al.
DOI:10.3390/app10041344

基于支持向量机 (SVM) 的自适应神经变结构观测器故障诊断与容错控制框图。
机器人手臂是一种多自由度的非线性系统,被广泛应用于医疗领域和汽车行业。机器人操作系统所处的不确定条件及其非线性特性,对故障诊断 (FD) 和容错控制 (FC) 提出了挑战。本文提出了一种基于机器学习的神经网络自适应高阶变结构观测器,用于FD和FC算法的自适应、现代、模糊、反步、变结构控制。第一阶段,作者提出了一种基于变结构观测器的机械臂FD技术,利用高阶变结构观测器解决了变结构观测器带来的抖振问题。然后,在FD流水线中引入神经网络算法,改进了高阶变结构观测器的动态行为估计性能。此外,支持向量机 (SVMs) 获得自适应阈值,用于故障分类。为了设计一种有效的容错控制器,本研究采用了一种自适应现代模糊反步变结构控制器。
5. A Survey on Robotic Technologies for Forest Firefighting: Applying Drone Swarms to Improve Firefighters Efficiency and Safety
森林消防机器人技术调查:应用无人机群提高消防员的效率和安全
Juan Jesús Roldán-Gómez, Eduardo González-Gironda and Antonio Barrientos
DOI:10.3390/app11010363

总体概略图。
森林消防任务包括预防、监视和灭火等多项任务。本研究针对消防员当前工作中的问题和潜在的技术解决方案进行了全面调查,此外还回顾了学术界和工业界为消防任务中应用不同类型机器人所做的努力。最后,基于以上所有信息,本文提出了无人机群在消防中综合应用的操作概念。文章中提出的系统是一组四轴飞行器,单独使用可访问航路点和有效载荷,集体使用则能够共同执行监视、测绘、监控等任务。本研究定义了三个操作员角色——任务指挥官、团队负责人和团队成员,每种角色对任务中的信息和功能具有不同的访问权限。这些操作员利用虚拟和增强现实界面,直观地获取场景信息,并在任务指挥官的指导下控制无人机群。
Applied Sciences 期刊介绍
主编:Takayoshi Kobayashi, The University of Electro-Communications, Japan
期刊自2011年创刊以来不断发展,为全球学者提供了一个涵盖应用自然科学各领域的高级论坛。期刊主题涉及应用物理学、应用化学、工程、环境和地球科学以及应用生物学的各个方面。截至目前被SCIE、Scopus等多个数据库收录,JCR 分区在多学科工程以及应用物理领域都在Q2。
2020 Impact Factor: 2.679
2020 CiteScore: 3.0
Time to First Decision: 17.7 Days
Time to Publication: 37 Days


特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






