西湖大学教授姜汉卿团队在国际上首次提出并开发了“高保真主动机械触感交互系统”,为元宇宙带来了全新的触觉感知维度。日前,相关研究成果刊登在《自然-机器智能》上。
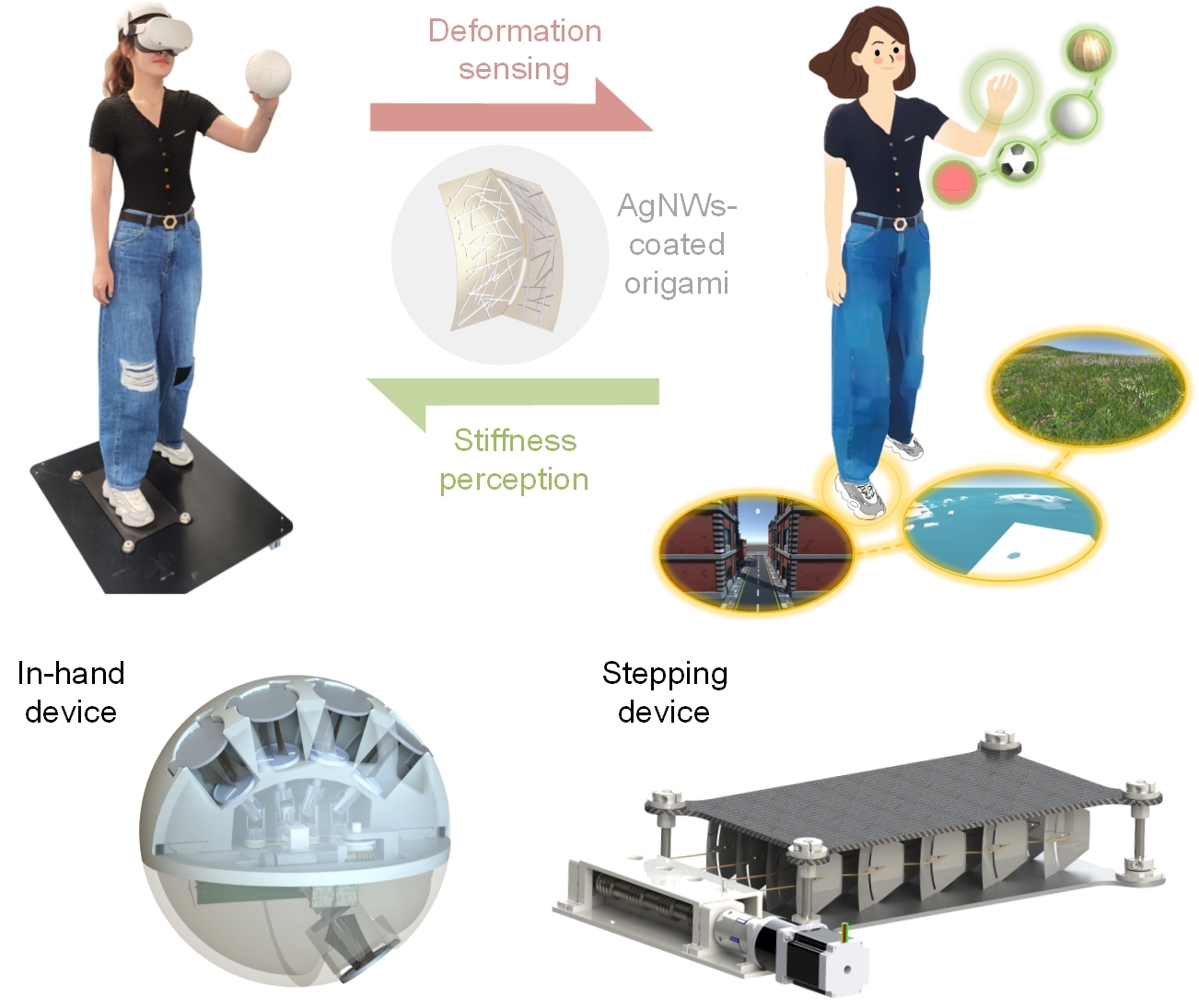
基于曲面折纸结构的虚实世界双向互通与多尺度交互装置集成。课题组供图
为让元宇宙触手可及,过往研究者们尝试过多种解决方案,大多为通过震动或压力代偿创造“被动触感”:包括常见的具有振动功能的手柄、可贴在皮肤上的振动马达、基于刚性连杆或绳索结构的电机驱动手部外骨骼等。此类“触感”均是由设备出发、给予用户被动的交互体验。
姜汉卿创造了“主动触觉”这个新概念——不同于肩、胸、腰、背等人类身体通常接收“被动触觉”的部位,人的手和脚通常是主动出击,通过主动触摸去感知物理世界。研究团队选择从“机械触感”(即刚度,物品的软硬触感)入手,模拟手和脚主动触摸物体时的感觉。
他们研发了一套“高保真主动机械触感交互系统”,利用不同材质、不同尺寸的折纸模块搭建了两种不同维度的交互装置:一种可引发局部触感的手持式装置,与一种可以产生全身体感的脚踏式装置。在使用手持式交互装置时,用户可通过主动抓握,体验其所交互的不同物品的软硬程度;在使用脚踏式装置时,用户则可通过主动踩踏,以全身运动的形式体验其所处的环境地面特性。
这种主动机械触感的实现,是源于硬件设备内部曲面折纸结构在交互过程中、由用户主动触发的被动变形——在电机的配合作用下,曲面折纸能弯曲成不同的角度,也会产生不同大小的反力,从而给予用户手足不同的“弹性”反馈。
姜汉卿举例道,将两张薄薄的塑料片对折,呈“X”状穿插在一起,想象一下,当你纵向“上下”按压塑料片,力量、角度不一样时,手收到的“回弹”反馈的感知也会不一样。这种触觉的变化传递给大脑,大脑就会根据“软硬”做出判断:抓到的是棉花,是木板,还是钢球……如果把手换成脚,大脑同样会根据脚所传递的刚度反馈,来判定人是走在马路上、草地上,还是踩在冰上……由此,人们在元宇宙的虚拟世界中,就可以完美实现“所见即所触,所处即所踏”了。(来源:中国科学报 温才妃)
相关论文信息:https://doi.org/10.1038/s42256-023-00671-z