|
|
|
|
|
新型攻击手段威胁工业机器人安全,孙优贤院士团队提出应对方案 Engineering |
|
|
论文标题: CORMAND2: A Deception Attack Against Industrial Robots
期刊:Engineering
作者:Hongyi Pu, Liang He, Peng Cheng, Jiming Chen, Youxian Sun
发表时间: January 2024
DOI:https://doi.org/10.1016/j.eng.2023.01.013
微信链接:点击此处阅读微信文章
浙江大学孙优贤院士团队在中国工程院院刊《Engineering》2024 年 1 月刊发表了题为“CORMAND2: A Deception Attack against Industrial Robots”(CORMAND2——针对工业机器人的欺骗攻击)的研究论文。该研究对工业机器人进行基于机密性、完整性和可用性(CIA 三元组)的漏洞分析,构建了一种新型欺骗攻击手段,通过数据欺骗掩盖对机器人的操纵(CORMAND2),同时验证了其在不同厂商机器人上的效果并提出防御措施。
随着工业物联网(IIoT)的发展,工业机器人在制造业中的应用越来越广泛。然而,这些机器人正面临着越来越多的网络安全风险。为了深入了解这些风险,浙江大学的研究团队对来自六个不同原始设备制造商(OEM)的七台工业机器人进行了实证分析。
研究发现,工业机器人在保密性、完整性和可用性三个维度上存在漏洞。例如,机器人的运动数据和用户凭证可以很容易地在未经授权的情况下被访问,这降低了机器人的保密性。同时,由于运动数据以明文形式传输,攻击者可以修改这些数据,从而破坏机器人的完整性。一旦攻击者获得了用户凭证并破坏了机器人的保密性,他们就可以上传恶意代码来操纵机器人的操作,这会损害机器人的可用性。
基于这些漏洞,研究团队构建了 CORMAND2,一种新型的网络物理攻击手段。CORMAND2 通过数据欺骗来掩盖对机器人的操纵,它利用受损的保密性来破坏完整性和可用性。具体来说,CORMAND2 包括攻击准备阶段和攻击实施阶段。在攻击准备阶段,它拦截机器人与监控和数据采集(SCADA)系统之间的通信数据包,识别并记录机器人的正常运动数据。在攻击实施阶段,它操纵机器人的操作,同时通过修改机器人的运动数据来欺骗 SCADA 系统,使其认为机器人仍在正常运行。
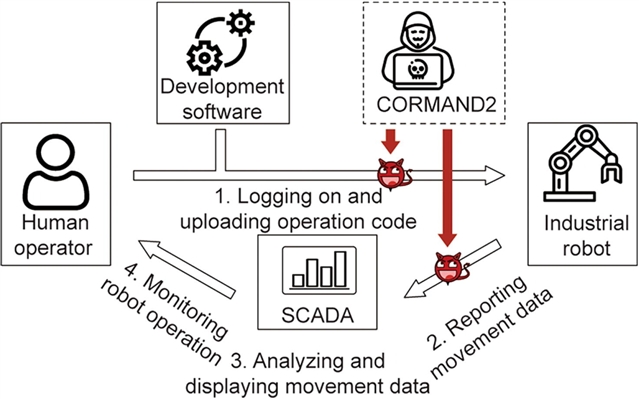
图1.典型的工业机器人操作和通过数据欺骗覆盖对机器人操作(CORMAND2)。SCADA:监控和数据采集。
为了评估 CORMAND2 的有效性,研究团队在 Secure Industrial Robot Pick-and-Place(SIRP)测试平台以及来自不同制造商的其他五台机器人上进行了实验。结果显示,CORMAND2 能够绕过现有的异常检测系统,这些系统通常假设 SCADA 接收的运动数据是真实的。此外,CORMAND2 在通信中增加的延迟非常小,平均仅为 1.7 毫秒,并且在制造网络中增加的数据包数量也可以忽略不计,仅为 0.42% - 1.10%。同时,CORMAND2 导致的最坏情况下的数据包丢失率仅为 0.0073%。
然而,CORMAND2 的攻击也可能给制造业带来严重后果。例如,攻击者可以通过操纵机器人的操作速度和加速度来降低生产效率,甚至可以对制造设施、产品和人类操作员造成物理损害。
为了应对 CORMAND2 攻击,研究团队提出了一系列解决方案。在攻击缓解方面,可以通过应用先进的加密算法来保护机器人的保密性,例如高级加密标准(AES)和 RSA。通过绑定设备的 MAC 和 IP 地址以及应用先进的消息摘要算法,可以保护机器人的完整性。为了保护机器人的可用性,可以禁用远程代码更新和执行,只允许通过手持设备进行更新。
在攻击检测方面,研究团队提出了一种基于功率消耗的异常检测系统。该系统通过监测机器人的实时功率消耗,并将其与预期的功率消耗进行比较,可以检测出潜在的 CORMAND2 攻击。该系统的平均检测率为 96.5%,延迟仅为 0.1 秒,并且能够检测到速度偏差为 5 mm/s和加速度偏差为 200 m/s²的异常情况,平均检测率超过 93%。
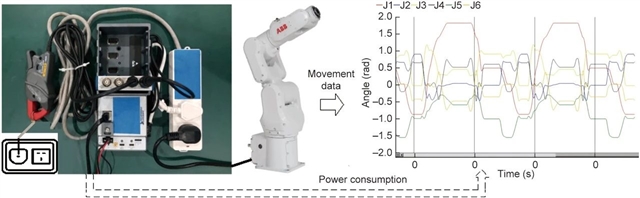
图2. 原型探测器,收集并向SCADA报告实时机器人功耗。
此外,该研究提供了一个从SIRP和其他五个机器人收集的超过三百万个通信数据包的数据集,以促进对机器人安全性的探索。同时,研究人员也可以通过机器人制造商提供的模拟平台来访问SIRP和研究机器人。
浙江大学孙优贤院士团队的这项研究为工业机器人的网络安全提供了重要的见解和解决方案。随着工业机器人在制造业中的重要性不断增加,确保其安全运行至关重要。未来,研究团队将继续探索更有效的方法来保护工业机器人免受网络攻击。
引用:
Hongyi Pu,Liang He,Peng Cheng,Jiming Chen,Youxian Sun. CORMAND2: A Deception Attack Against Industrial Robots[J]. Engineering,2024,32(1):186–201.

Open access
开放获取全文
https://doi.org/10.1016/j.eng.2023.01.013
推荐阅读
磁控微型机器人选择性与独立控制最新进展
人工智能让机器人变得更智能
杨春和院士团队:中国深部地下空间储能的理论和技术挑战
中国中医科学院团队发现雷公藤多苷片治疗类风湿关节炎的效毒机制
专题征稿:千种本草基因组计划
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






