封面图片由中国科学报社科学可视化中心制作
在21世纪, 社会发展伴随着快速增长的资源需求, 为开采丰富的海洋资源, 海洋工程领域日益受到全球各国关注. 在这种情况下, 积极发展海洋装备设施技术至关重要. 深海起重机在海洋工程中扮演着重要角色, 例如海底隧道的搭建、跨海桥梁等项目中水下吊装作业和水下补给等任务. 因此, 针对深海起重机的研究具有非常重要的实际意义。
然而, 由于起重机的固有结构, 其所吊运负载的运动无法直接驱动, 只能通过台车运动间接控制, 从而产生欠驱动自由度(即负载摆角). 这种待控自由度多于控制输入的系统, 被称作欠驱动系统. 欠驱动系统在工业生产中普遍存在, 如欠驱动机械臂、下肢外骨骼、无人机系统、欠驱动TORA(Translational oscillators with rotating actuator)系统以及欠驱动起重机系统, 其中欠驱动起重机系统又可细分为桥式起重机系统、塔式起重机系统、桅杆式起重机系统、伴有双摆特性的起重机系统等.
本文研究的深海起重机系统是一种在水下环境运输负载的欠驱动桥式起重机系统. 一方面, 系统本身存在复杂的欠驱动特性、非线性与耦合性; 另一方面, 在特殊的应用环境下, 负载运输过程还会受到水流作用力的影响. 海水作用力的存在也使系统各状态量间耦合关系更为复杂. 因此, 深海起重机系统依然存在许多悬而未决的控制难题.
近年来, 轨迹规划方法成为解决欠驱动系统控制问题的常用方法, 用轨迹规划解决起重机控制问题也逐渐一般化, 此类方法可看作从系统输入到输出的一种解, 通过考虑具体的控制目标, 将已知参数与期望轨迹作为系统输入, 并将可驱动状态量(如桥式起重机的台车位移、速度、加速度)的时间序列作为系统输出. 根据实际需求, 规划所得轨迹可对系统能耗、运输效率等指标进行优化, 同时还能够保证吊运的平稳性和准确性.
迄今为止,现有的针对陆地起重机系统的轨迹规划方法均需离线进行, 无法很好地实现对系统的实时规划/控制, 因此, 在一些对实时性要求较高的场合, 现有离线规划方法便不再适用. 并且现有轨迹规划方法均是针对陆地起重机系统设计的, 在水下环境中(存在水流影响)往往难以直接适用. 除此之外, 大多现有的轨迹规划方法均将复杂非线性系统的模型线性化, 当负载摆动较大导致线性化条件不成立时便无法保证控制性能.
因此, 本文在未对复杂非线性模型线性化的前提下, 考虑水流作用, 为深海起重机系统设计了一种结构简单、参数易于调整的新型轨迹.
本文主要贡献如下:
1) 针对深海起重机系统, 提出了一种新型实时轨迹规划方法, 该方法基于非线性系统模型, 无需线性化近似;
2) 通过理论分析与仿真结果, 均证明了所提方法可使台车精确定位, 有效抑制负载摆动, 且对外部干扰有较强的鲁棒性, 同时也具有实时性, 可根据不同目标位置在线调整规划轨迹;
3) 该方法结合深海起重机系统在水下的作业环境, 考虑了在水流干扰下负载(如核燃料棒)呈现出的柔性特性.
深海起重机系统动力学模型
图1是二维空间中深海起重机系统示意图, 其中在惯性坐标系iOj中,x(t)表示台车位移,u(t)表示驱动台车的控制输入.I表示截面惯性矩. 定义柔性负载与台车连接端在i方向上的位置为i=0, 负载自然状态下原长为l,w(y,t)表示在时刻t及i方向上i=y处负载元的横向偏差(即负载摆动),fw(y,t)表示负载对应位置受到的水作用力. 系统参数如表1所示.

图 1 深海柔性起重机系统

表 1 系统参数
轨迹规划
为实现上述控制目标, 本节将提出具体的实时轨迹规划方法, 并给出相应的理论分析.
仿真结果与分析
为验证所提轨迹规划方法的有效性, 本节使用MATLAB进行数值仿真, 首先说明了应用本文所提方法前后负载振动幅度的变化, 接着测试了在有外部扰动(初始扰动与中间扰动)、多次变换目标位置、与已有轨迹规划方法相比较三种设定情况下的轨迹跟踪消摆性能.
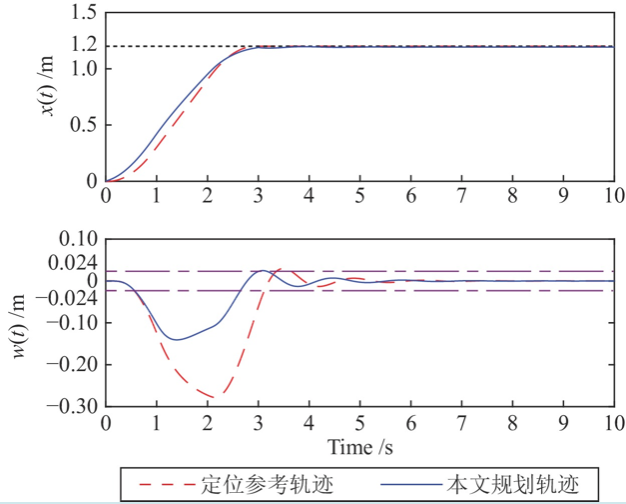
图 2 仿真对比结果
由一系列仿真结果可知, 本文所提实时消摆轨迹可在使台车快速、准确到达目标位置的同时, 较好地抑制柔性负载摆动.
结论
基于深海柔性起重机系统可驱变量与不可驱变量间的非线性耦合关系, 本文提出一种实时轨迹规划方法, 该方法不仅能实现台车精确定位, 有效抑制负载摆动, 而且对外部干扰有较强的鲁棒性, 同时也可根据不同目标位置实时调整规划轨迹, 具有实时性. 经过理论分析, 证明了系统各变量的收敛性, 且仿真结果也验证了所设计轨迹良好的消摆控制性能. 在今后的研究中, 将进一步缩小定位参考轨迹的选择范围(例如可以优先选择结构形式简单、参数数量少、阶次低的表达式作为定位参考轨迹), 并将实时规划方法推广到其他欠驱动系统.(来源:科学网)
相关论文信息:doi: 10.16383/j.aas.c200262






