|
|
|
中国科学院沈阳自动化研究所等 |
|
连续体机器人主动避障控制研究获新进展 |
|
|
近日,中国科学院沈阳自动化研究所(以下简称沈阳自动化所)研究员刘浩团队与友谊医院教授张忠涛团队合作,在连续体机器人的主动避障控制方面研究取得新进展,相关研究成果在线发表于《国际机器人研究杂志》(The International Journal of Robotics Research)。
据了解,连续体机器人具有主动避障能力,作为医疗机器人在人体腔道的复杂环境中作业时,可有效避免机器人本体与人体组织或多个机器人之间的碰撞,有利于保证手术的安全与质量。
?
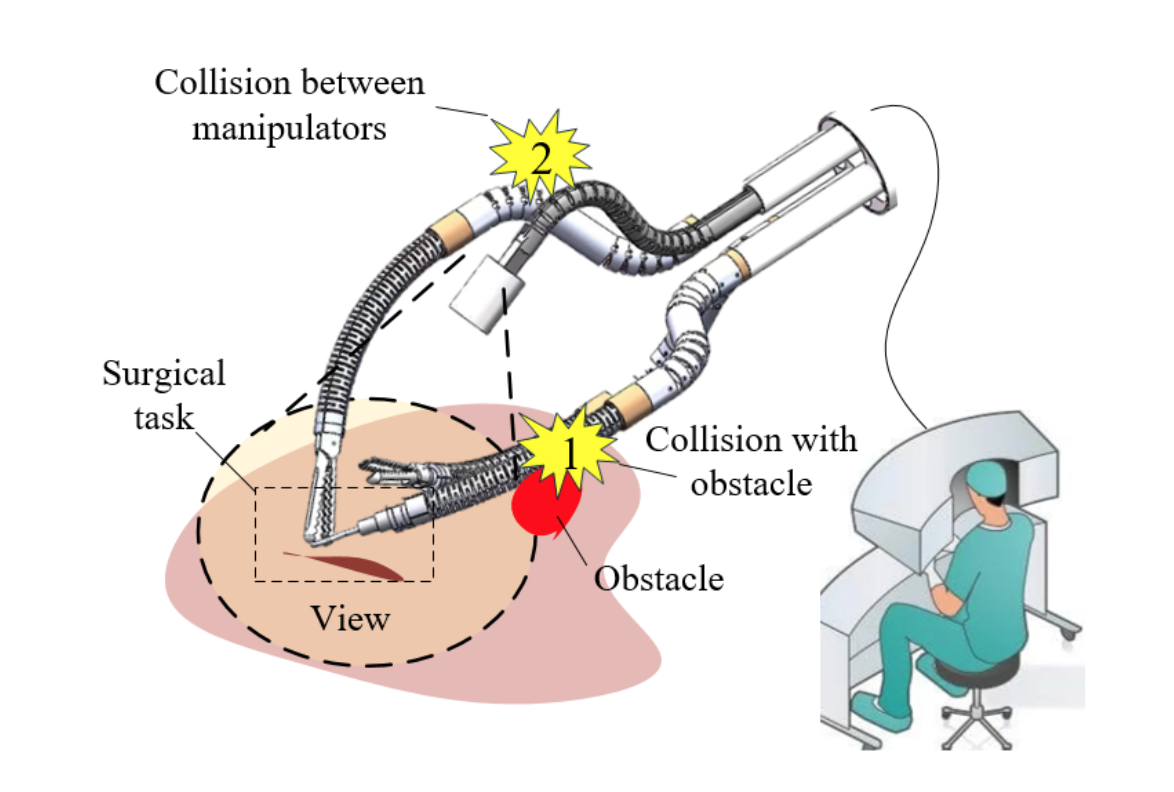
连续体手术机器人在人体腔道作业面临的挑战。沈阳自动化所供图
然而,由于连续体机器人柔性结构与障碍环境的不规则性,表达两者之间的空间形态关系并实现主动安全交互,是一个提高机器人主动避障能力的具有挑战性的问题。
为了突破上述问题,研究团队提出一种通用的主动避障控制框架。该框架包括连续体机器人几何模型的简洁表达式,机器人与任意形状障碍物之间的碰撞检测方法,适应不同任务的避碰控制器,以及评估机器人避碰能力的评价准则。该框架为连续体机器人的安全手术提供了一种有效可行的方法,有望推动机器人辅助手术向更智能的方向发展。
《中国科学报》从沈阳自动化所获悉,刘浩团队长期专注于消化、支气管、血管等人体腔道柔性手术机器人的关键技术及系统研发,在手术机器人的构型创成、感知、导航以及智能化等方面的研究取得了多项突破成果,消化内镜机器人等成果已经进入临床阶段。
相关论文信息:https://doi.org/10.1177/02783649231220955
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:
[email protected]。